
152-5007-1053




2025/11/04
YHH- 三自由度
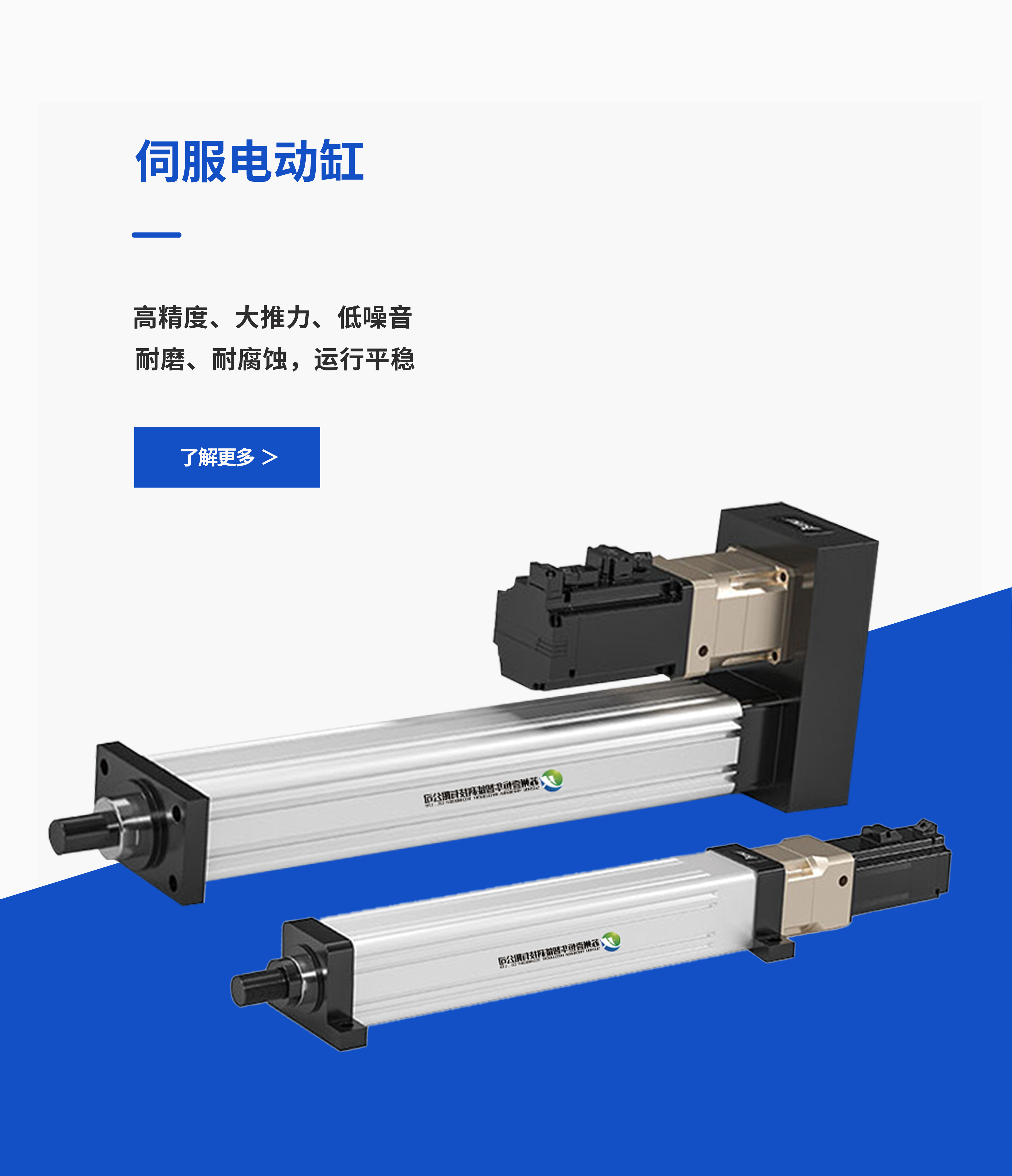
三自由度平台是由三支伺服电动缸,上下各三只万向铰链(虎克铰)和上下两个平台组成。下平台固定在基础设施,借助三支同服电动缸的伸缩运动,完成平台在空间三个自由度(X、Y、2、a、B、y)的运动
三自由度平台是由三支伺服电动缸,上下各三只万向铰链(虎克铰)和上下两个平台组成。下平台固定在基础设施,借助三支同服电动缸的伸缩运动,完成平台在空间三个自由度(X、Y、2、a、B、y)的运动
2025/12/23
YHH- 六自由度-带栏杆
六自由度运动平台是由六支电缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六支电缸的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。
六自由度运动平台是由六支电缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六支电缸的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。
2025/11/04
YHH- 六自由度
六自由度运动平台是由六支电缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六支电缸的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。
六自由度运动平台是由六支电缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六支电缸的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。
2025/12/23
YHH- 六自由度-防水型
六自由度运动平台是由六支电缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六支电缸的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。
六自由度运动平台是由六支电缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六支电缸的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。
2025/12/23
YHH- 六自由度平台
六自由度运动平台是由六支电缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六支电缸的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。
六自由度运动平台是由六支电缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六支电缸的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。
2025/12/23
YHH- 六自由度平台
六自由度运动平台是由六支电缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六支电缸的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。
六自由度运动平台是由六支电缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六支电缸的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。
2025/12/23
YHH- 六自由度平台
六自由度运动平台是由六支电缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六支电缸的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。
六自由度运动平台是由六支电缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六支电缸的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。
2025/12/23
YHH- 三自由度
三自由度平台是由三支伺服电动缸,上下各三只万向铰链(虎克铰)和上下两个平台组成。下平台固定在基础设施,借助三支同服电动缸的伸缩运动,完成平台在空间三个自由度(X、Y、2、a、B、y)的运动
三自由度平台是由三支伺服电动缸,上下各三只万向铰链(虎克铰)和上下两个平台组成。下平台固定在基础设施,借助三支同服电动缸的伸缩运动,完成平台在空间三个自由度(X、Y、2、a、B、y)的运动




长按屏幕识别二维码
打开手机扫描二维码

