152-5007-1053


 咨询热线:15250073161
咨询热线:15250073161
 参数仅供参考,详情请联系客服 • • • •
参数仅供参考,详情请联系客服 • • • •
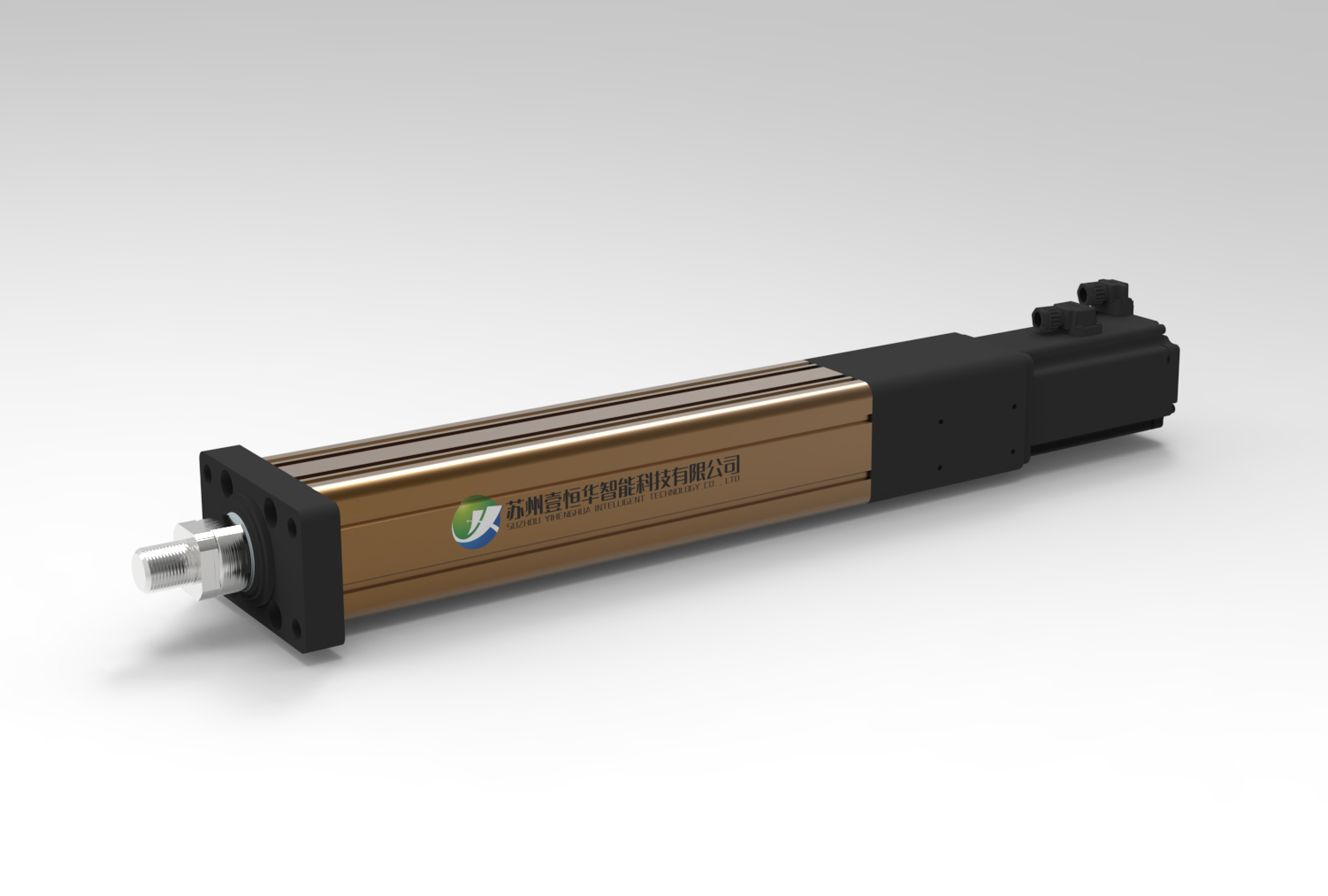
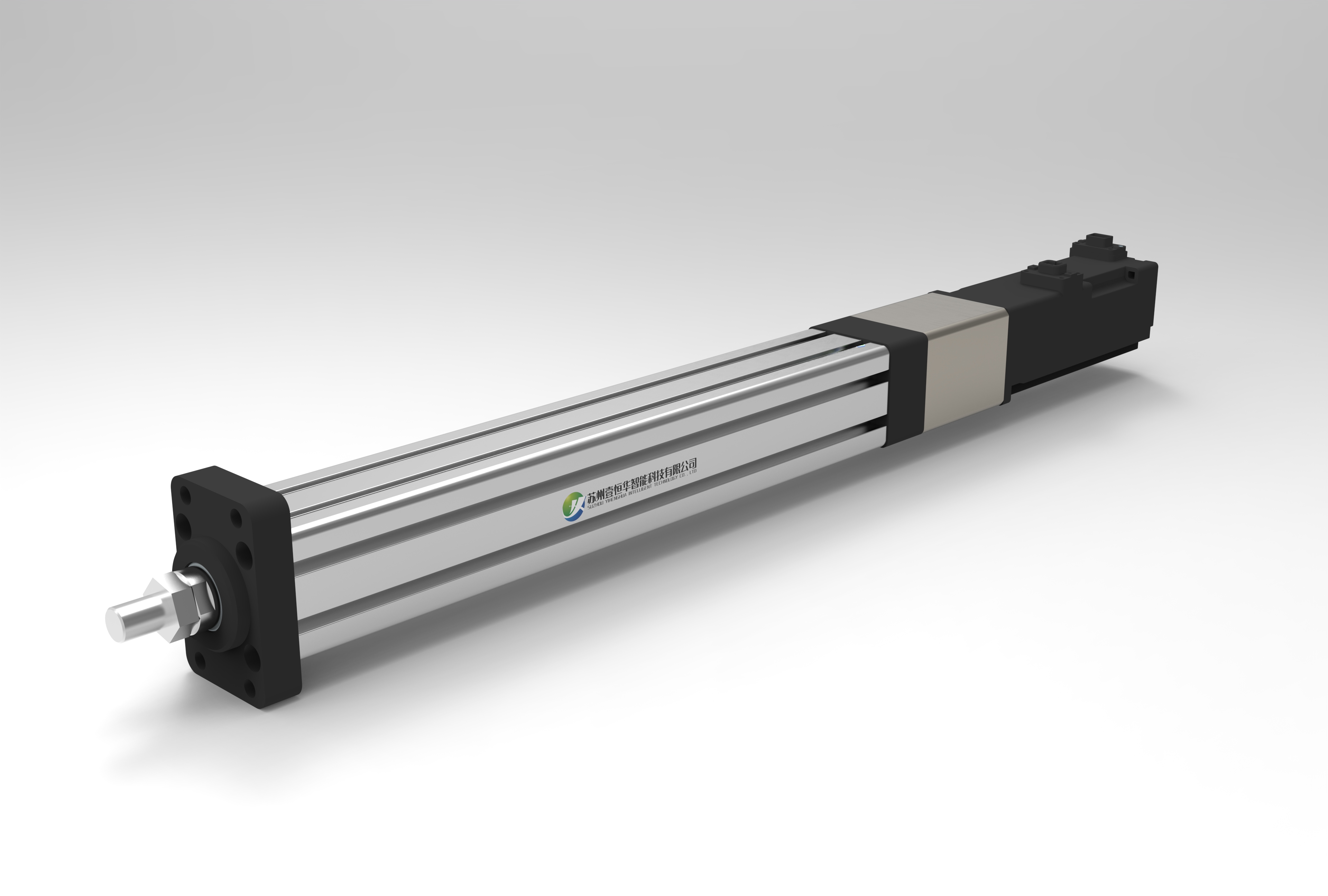
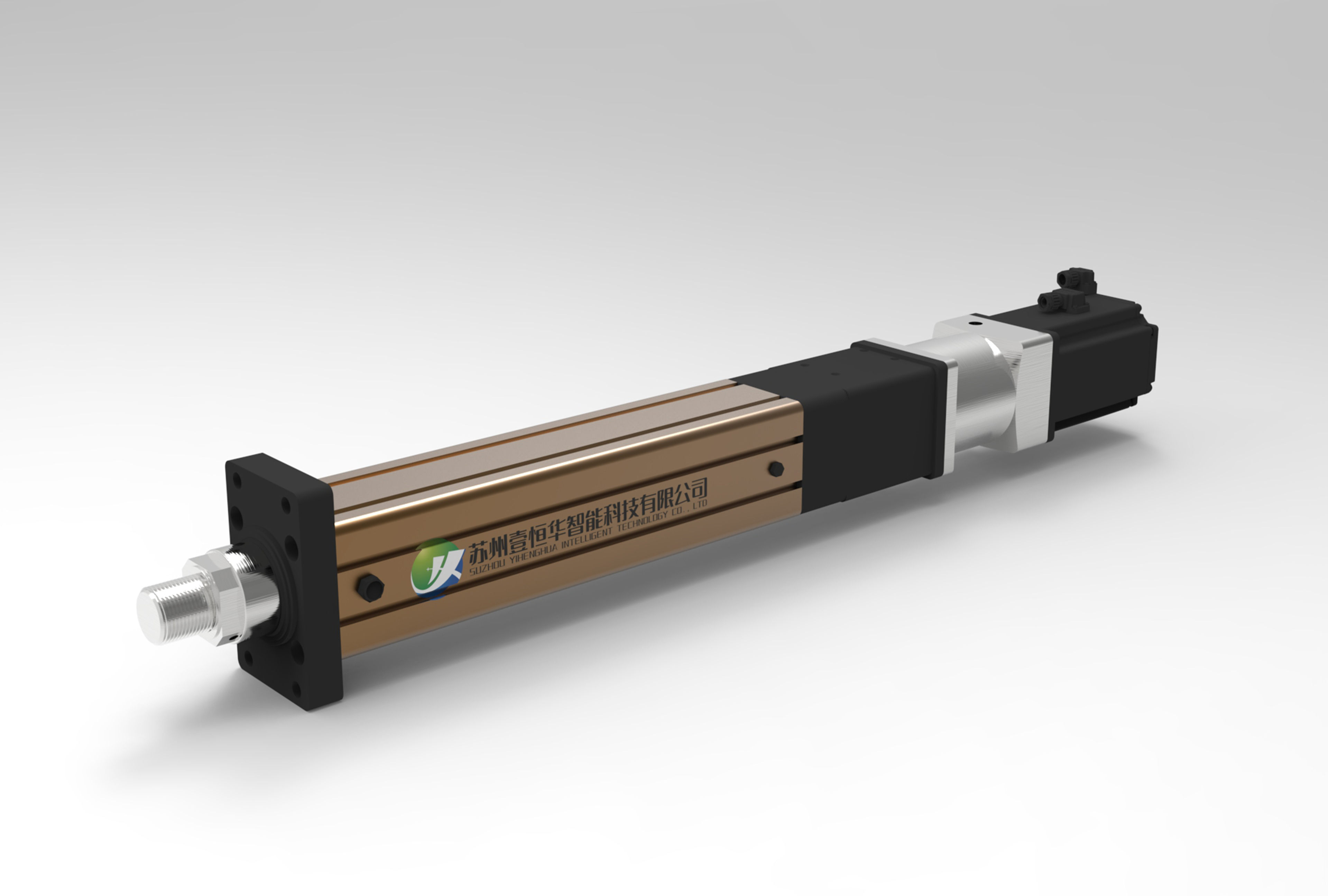
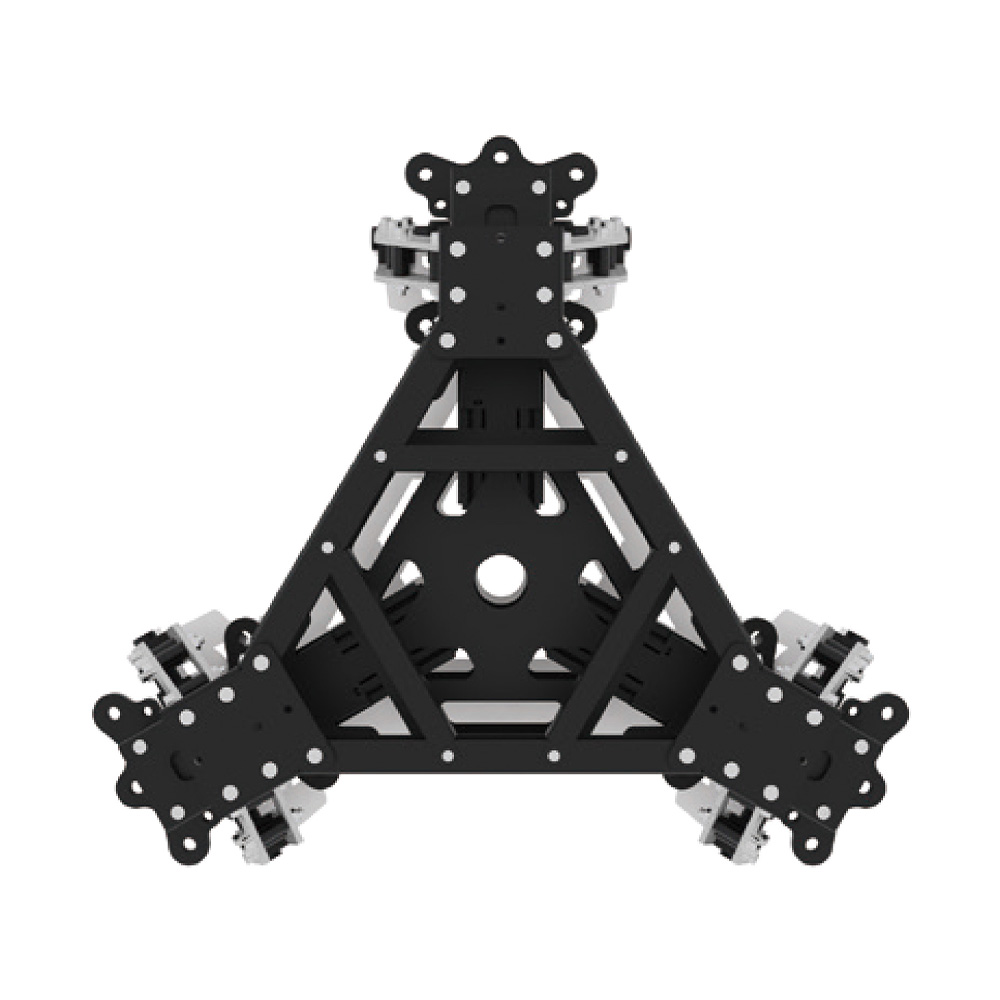
产品简介
三自由度平台是一种机械系统,具有三个独立的自由度,即可以在三个方向上进行运动。它通常由三个旋转关节或转动轴组成,每个关节或轴可以使平台在一个方向上旋转或转动。通过控制这些关节或轴的运动,可以实现平台在三个方向上的运动和定位。
三自由度平台广泛应用于机器人、模拟器、虚拟现实等领域。在机器人领域,它可以用作机器人的底座或平台,用于控制机器人的运动和姿态。在模拟器和虚拟现实领域,它可以用于模拟运动的平台,使用户能够在虚拟环境中感受到真实的运动和体验。
三自由度平台的动力学和控制是研究的重点之一。通过分析平台的几何结构和运动学关系,可以建立平台的动力学模型。然后,根据需要的运动和控制要求,设计合适的控制算法和策略,实现平台的运动和定位控制
产品规格
|
运动范围参数 |
运动方式 | 三自由度 |
| 俯仰
|
±20°
| |
| 滚转 | ±20°
| |
| 偏航 | - | |
| 升降 | ±50mm
| |
| 前冲 | - | |
| 横移 | - | |
|
其他参数 |
额定速度 | 250mm/s
|
| 有限负载 | 500kg
| |
| 额定出力 | 1200N
| |
| 行程 | 100mm | |
| 电机功率 | 1.5kw | |
| 电机转速 | 3000rpm | |
| 电机电流 | 20A | |
| 电机扭矩 | 1.3N/M | |
| 驱动器电压 | 220V | |
| 驱动器电流 | 20A | |
| 减速比 | 1.5 | |
| 安装方式 | 前后叉铰/法兰/耳轴
| |
| 尺寸 | 827*755*439mm
| |
| 控制方式 | EtherCAT总线/ CAN总线
|


长按屏幕识别二维码
打开手机扫描二维码